|
|
@@ -3,14 +3,22 @@
|
|
|
Using NavigationPathQueryObjects
|
|
|
================================
|
|
|
|
|
|
+.. tip::
|
|
|
+
|
|
|
+ Path query parameters expose various options to improve pathfinding performance or lower memory consumption.
|
|
|
+
|
|
|
+ They cater to more advanced pathfinding needs that the high-level nodes can not always cover.
|
|
|
+
|
|
|
+ See the respective option sections below.
|
|
|
+
|
|
|
``NavigationPathQueryObjects`` can be used together with ``NavigationServer.query_path()``
|
|
|
-to obtain a heavily **customized** navigation path including optional **meta data** about the path.
|
|
|
+to obtain a heavily **customized** navigation path including optional **metadata** about the path.
|
|
|
|
|
|
This requires more setup compared to obtaining a normal NavigationPath but lets you tailor
|
|
|
the pathfinding and provided path data to the different needs of a project.
|
|
|
|
|
|
NavigationPathQueryObjects consist of a pair of objects, a ``NavigationPathQueryParameters`` object holding the customization options
|
|
|
-for the query and a ``NavigationPathQueryResult`` that receives (regular) updates with the resulting path and meta data from the query.
|
|
|
+for the query and a ``NavigationPathQueryResult`` that receives (regular) updates with the resulting path and metadata from the query.
|
|
|
|
|
|
2D and 3D versions of ``NavigationPathQueryParameters`` are available as
|
|
|
:ref:`NavigationPathQueryParameters2D<class_NavigationPathQueryParameters2D>` and
|
|
|
@@ -20,18 +28,26 @@ for the query and a ``NavigationPathQueryResult`` that receives (regular) update
|
|
|
:ref:`NavigationPathQueryResult2D<class_NavigationPathQueryResult2D>` and
|
|
|
:ref:`NavigationPathQueryResult3D<class_NavigationPathQueryResult3D>` respectively.
|
|
|
|
|
|
+Creating a basic path query
|
|
|
+---------------------------
|
|
|
+
|
|
|
Both parameters and result are used as a pair with the ``NavigationServer.query_path()`` function.
|
|
|
|
|
|
-For the available customization options and their use see the class doc of the parameters.
|
|
|
+For the available customization options, see further below. See also the descriptions for each parameter in the class reference.
|
|
|
|
|
|
While not a strict requirement, both objects are intended to be created once in advance, stored in a
|
|
|
persistent variable for the agent and reused for every followup path query with updated parameters.
|
|
|
-This reuse avoids performance implications from frequent object creation if a project
|
|
|
-has a large quantity of simultaneous agents that regularly update their paths.
|
|
|
+
|
|
|
+Reusing the same objects improves performance when frequently creating objects or allocating memory.
|
|
|
+
|
|
|
+The following script creates the objects and provides a ``query_path()`` function to create new navigation paths.
|
|
|
+The resulting path is identical to using ``NavigationServer.map_get_path()`` while reusing the objects.
|
|
|
|
|
|
.. tabs::
|
|
|
.. code-tab:: gdscript 2D GDScript
|
|
|
|
|
|
+ extends Node2D
|
|
|
+
|
|
|
# Prepare query objects.
|
|
|
var query_parameters := NavigationPathQueryParameters2D.new()
|
|
|
var query_result := NavigationPathQueryResult2D.new()
|
|
|
@@ -40,7 +56,13 @@ has a large quantity of simultaneous agents that regularly update their paths.
|
|
|
if not is_inside_tree():
|
|
|
return PackedVector2Array()
|
|
|
|
|
|
- query_parameters.map = get_world_2d().get_navigation_map()
|
|
|
+ var map: RID = get_world_2d().get_navigation_map()
|
|
|
+
|
|
|
+ if NavigationServer2D.map_get_iteration_id(map) == 0:
|
|
|
+ # This map has never synced and is empty, no point in querying it.
|
|
|
+ return PackedVector2Array()
|
|
|
+
|
|
|
+ query_parameters.map = map
|
|
|
query_parameters.start_position = p_start_position
|
|
|
query_parameters.target_position = p_target_position
|
|
|
query_parameters.navigation_layers = p_navigation_layers
|
|
|
@@ -50,9 +72,10 @@ has a large quantity of simultaneous agents that regularly update their paths.
|
|
|
|
|
|
return path
|
|
|
|
|
|
-
|
|
|
.. code-tab:: gdscript 3D GDScript
|
|
|
|
|
|
+ extends Node3D
|
|
|
+
|
|
|
# Prepare query objects.
|
|
|
var query_parameters := NavigationPathQueryParameters3D.new()
|
|
|
var query_result := NavigationPathQueryResult3D.new()
|
|
|
@@ -61,7 +84,13 @@ has a large quantity of simultaneous agents that regularly update their paths.
|
|
|
if not is_inside_tree():
|
|
|
return PackedVector3Array()
|
|
|
|
|
|
- query_parameters.map = get_world_3d().get_navigation_map()
|
|
|
+ var map: RID = get_world_3d().get_navigation_map()
|
|
|
+
|
|
|
+ if NavigationServer3D.map_get_iteration_id(map) == 0:
|
|
|
+ # This map has never synced and is empty, no point in querying it.
|
|
|
+ return PackedVector3Array()
|
|
|
+
|
|
|
+ query_parameters.map = map
|
|
|
query_parameters.start_position = p_start_position
|
|
|
query_parameters.target_position = p_target_position
|
|
|
query_parameters.navigation_layers = p_navigation_layers
|
|
|
@@ -70,3 +99,207 @@ has a large quantity of simultaneous agents that regularly update their paths.
|
|
|
var path: PackedVector3Array = query_result.get_path()
|
|
|
|
|
|
return path
|
|
|
+
|
|
|
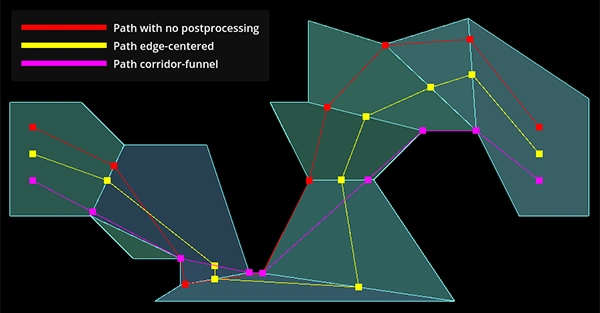
+Path postprocessing options
|
|
|
+---------------------------
|
|
|
+
|
|
|
+.. figure:: img/path_postprocess_diff.webp
|
|
|
+ :align: center
|
|
|
+ :alt: Path post-processing differences depending on navigation mesh polygon layout
|
|
|
+
|
|
|
+ Path post-processing differences depending on navigation mesh polygon layout.
|
|
|
+
|
|
|
+A path query search travels from the closest navigation mesh polygon edge to the closest edge along the available polygons.
|
|
|
+If possible it builds a polygon corridor towards the target position polygon.
|
|
|
+
|
|
|
+This raw "search" polygon corridor path is not very optimized and usually a bad fit for agents to travel along.
|
|
|
+E.g. the closest edge point on a navigation mesh polygon might cause a huge detour for agents on larger polygons.
|
|
|
+In order to improve the quality of paths returned by the query various ``path_postprocessing`` options exist.
|
|
|
+
|
|
|
+- The ``PATH_POSTPROCESSING_CORRIDORFUNNEL`` post-processing shortens paths by funneling paths around corners **inside the available polygon corridor**.
|
|
|
+
|
|
|
+ This is the default post-processing and usually also the most useful as it gives the shortest path result **inside the available polygon corridor**.
|
|
|
+ If the polygon corridor is already suboptimal, e.g. due to a suboptimal navigation mesh layout,
|
|
|
+ the funnel can snap to unexpected polygon corners causing detours.
|
|
|
+
|
|
|
+- The ``PATH_POSTPROCESSING_EDGECENTERED`` post-processing forces all path points to be placed in the middle of the crossed polygon edges **inside the available polygon corridor**.
|
|
|
+
|
|
|
+ This post-processing is usually only useful when used with strictly tile-like navigation mesh polygons that are all
|
|
|
+ evenly sized and where the expected path following is also constrained to cell centers,
|
|
|
+ e.g. typical grid game with movement constrained to grid cell centers.
|
|
|
+
|
|
|
+- The ``PATH_POSTPROCESSING_NONE`` post-processing returns the path as is how the pathfinding traveled **inside the available polygon corridor**.
|
|
|
+
|
|
|
+ This post-processing is very useful for debug as it shows how the path search traveled from closest edge point to closet edge point and what polygons it picked.
|
|
|
+ A lot of unexpected or suboptimal path results can be immediately explained by looking at this raw path and polygon corridor.
|
|
|
+
|
|
|
+Path simplification
|
|
|
+-------------------
|
|
|
+
|
|
|
+.. tip::
|
|
|
+
|
|
|
+ Path simplification can help steering agents or agents that jitter on thin polygon edges.
|
|
|
+
|
|
|
+.. figure:: img/path_simplification_diff.webp
|
|
|
+ :align: center
|
|
|
+ :alt: Path point difference with or without path simplification
|
|
|
+
|
|
|
+ Path point difference with or without path simplification.
|
|
|
+
|
|
|
+If ``simplify_path`` is enabled a variant of the Ramer-Douglas-Peucker path simplification algorithm is applied to the path.
|
|
|
+This algorithm straightens paths by removing less relevant path points depending on the ``simplify_epsilon`` used.
|
|
|
+
|
|
|
+Path simplification helps with all kinds of agent movement problems in "open fields" that are caused by having many unnecessary polygon edges.
|
|
|
+E.g. a terrain mesh when baked to a navigation mesh can cause an excessive polygon count due to all the small (but for pathfinding almost meaningless) height variations in the terrain.
|
|
|
+
|
|
|
+Path simplification also helps with "steering" agents because they only have more critical corner path points to aim for.
|
|
|
+
|
|
|
+.. Warning::
|
|
|
+
|
|
|
+ Path simplification is an additional final post-processing of the path. It adds extra performance costs to the query so only enable when actually needed.
|
|
|
+
|
|
|
+.. note::
|
|
|
+
|
|
|
+ Path simplification is exposed on the NavigationServer as a generic function. It can be used outside of navigation queries for all kinds of position arrays as well.
|
|
|
+
|
|
|
+Path metadata
|
|
|
+-------------
|
|
|
+
|
|
|
+.. tip::
|
|
|
+
|
|
|
+ Disabling unneeded path metadata options can improve performance and lower memory consumption.
|
|
|
+
|
|
|
+A path query can return additional metadata for every path point.
|
|
|
+
|
|
|
+- The ``PATH_METADATA_INCLUDE_TYPES`` flag collects an array with the primitive information about the point owners, e.g. if a point belongs to a region or link.
|
|
|
+- The ``PATH_METADATA_INCLUDE_RIDS`` flag collects an array with the :ref:`RIDs<class_RID>` of the point owners. Depending on point owner primitive, these RIDs can be used with the various NavigationServer functions related to regions or links.
|
|
|
+- The ``PATH_METADATA_INCLUDE_OWNERS`` flag collects an array with the ``ObjectIDs`` of the point owners. These object IDs can be used with :ref:`@GlobalScope.instance_from_id()<class_@GlobalScope_method_instance_from_id>` to retrieve the node behind that object instance, e.g. a NavigationRegion or NavigationLink node.
|
|
|
+
|
|
|
+By default all path metadata is collected as this metadata can be essential for more advanced navigation gameplay.
|
|
|
+
|
|
|
+- E.g. to know what path point maps to what object or node owner inside the SceneTree.
|
|
|
+- E.g. to know if a path point is the start or end of a navigation link that requires scripted takeover.
|
|
|
+
|
|
|
+For the most basic path uses metadata is not always needed.
|
|
|
+Path metadata collection can be selectively disabled to gain some performance and reduce memory consumption.
|
|
|
+
|
|
|
+Excluding or including regions
|
|
|
+------------------------------
|
|
|
+
|
|
|
+.. tip::
|
|
|
+
|
|
|
+ Region filters can greatly help with performance on large navigation maps that are region partitioned.
|
|
|
+
|
|
|
+Query parameters allow limiting the pathfinding to specific region navigation meshes.
|
|
|
+
|
|
|
+If a large navigation map is well partitioned into smaller regions this can greatly help with performance as the
|
|
|
+query can skip a large number of polygons at one of the earliest checks in the path search.
|
|
|
+
|
|
|
+- By default and if left empty all regions of the queried navigation map are included.
|
|
|
+- If a region :ref:`RID<class_RID>` is added to the ``excluded_regions`` array the region's navigation mesh will be ignored in the path search.
|
|
|
+- If a region :ref:`RID<class_RID>` is added to the ``included_regions`` array the region's navigation mesh will be considered in the path search and also all other regions not included will be ignored as well.
|
|
|
+- If a region ends up both included and excluded it is considered excluded.
|
|
|
+
|
|
|
+Region filters are very effective for performance when paired with navigation region chunks that are aligned on a grid.
|
|
|
+This way the filter can be set to only include the start position chunk and surrounding chunks instead of the entire navigation map.
|
|
|
+
|
|
|
+Even if the target might be outside these surrounding chunks (can always add more "rings") the pathfinding will
|
|
|
+try to create a path to the polygon closest to the target.
|
|
|
+This usually creates half-paths heading in the general direction that are good enough,
|
|
|
+all for a fraction of the performance cost of a full map search.
|
|
|
+
|
|
|
+The following addition to the basic path query script showcases the idea how to integrate a region chunk mapping with the region filters.
|
|
|
+This is not a full working example.
|
|
|
+
|
|
|
+.. tabs::
|
|
|
+ .. code-tab:: gdscript 2D GDScript
|
|
|
+
|
|
|
+ extends Node2D
|
|
|
+
|
|
|
+ # ...
|
|
|
+
|
|
|
+ var chunk_id_to_region_rid: Dictionary[Vector2i, RID] = {}
|
|
|
+
|
|
|
+ func query_path(p_start_position: Vector2, p_target_position: Vector2, p_navigation_layers: int = 1) -> PackedVector2Array:
|
|
|
+
|
|
|
+ # ...
|
|
|
+
|
|
|
+ var regions_around_start_position: Array[RID] = []
|
|
|
+
|
|
|
+ var chunk_rings: int = 1 # Increase for very small regions or more quality.
|
|
|
+ var start_chunk_id: Vector2i = floor(p_start_position / float(chunk_size))
|
|
|
+
|
|
|
+ for y: int in range(start_chunk_id.y - chunk_rings, start_chunk_id.y + chunk_rings):
|
|
|
+ for x: int in range(start_chunk_id.x - chunk_rings, start_chunk_id.x + chunk_rings):
|
|
|
+ var chunk_id: Vector2i = Vector2i(x, y)
|
|
|
+ if chunk_id_to_region_rid.has(chunk_id):
|
|
|
+ var region: RID = chunk_id_to_region_rid[chunk_id]
|
|
|
+ regions_around_start_position.push_back(region)
|
|
|
+
|
|
|
+ query_parameters.included_regions = regions_around_start_position
|
|
|
+
|
|
|
+ # ...
|
|
|
+
|
|
|
+ .. code-tab:: gdscript 3D GDScript
|
|
|
+
|
|
|
+ extends Node3D
|
|
|
+
|
|
|
+ # ...
|
|
|
+
|
|
|
+ var chunk_id_to_region_rid: Dictionary[Vector3i, RID] = {}
|
|
|
+
|
|
|
+ func query_path(p_start_position: Vector3, p_target_position: Vector3, p_navigation_layers: int = 1) -> PackedVector3Array:
|
|
|
+
|
|
|
+ # ...
|
|
|
+
|
|
|
+ var regions_around_start_position: Array[RID] = []
|
|
|
+
|
|
|
+ var chunk_rings: int = 1 # Increase for very small regions or more quality.
|
|
|
+ var start_chunk_id: Vector3i = floor(p_start_position / float(chunk_size))
|
|
|
+ var y: int = 0 # Assume a planar navigation map for simplicity.
|
|
|
+
|
|
|
+ for z: int in range(start_chunk_id.z - chunk_rings, start_chunk_id.z + chunk_rings):
|
|
|
+ for x: int in range(start_chunk_id.x - chunk_rings, start_chunk_id.x + chunk_rings):
|
|
|
+ var chunk_id: Vector3i = Vector3i(x, y, z)
|
|
|
+ if chunk_id_to_region_rid.has(chunk_id):
|
|
|
+ var region: RID = chunk_id_to_region_rid[chunk_id]
|
|
|
+ regions_around_start_position.push_back(region)
|
|
|
+
|
|
|
+ query_parameters.included_regions = regions_around_start_position
|
|
|
+
|
|
|
+ # ...
|
|
|
+
|
|
|
+Path clipping and limits
|
|
|
+------------------------
|
|
|
+
|
|
|
+.. tip::
|
|
|
+
|
|
|
+ Sensibly set limits can greatly help with performance on large navigation maps, especially when targets end up being unreachable.
|
|
|
+
|
|
|
+.. figure:: img/path_clip_and_limits.gif
|
|
|
+ :align: center
|
|
|
+ :alt: Clipping returned paths to specific distances
|
|
|
+
|
|
|
+ Clipping returned paths to specific distances.
|
|
|
+
|
|
|
+Query parameters allow clipping returned paths to specific lengths.
|
|
|
+These options clip the path as a part of post-processing. The path is still searched as if at full length,
|
|
|
+so it will have the same quality.
|
|
|
+Path length clipping can be helpful in creating paths that better fit constrained gameplay, e.g. tactical games with limited movement ranges.
|
|
|
+
|
|
|
+- The ``path_return_max_length`` property can be used to clip the returned path to a specific max length.
|
|
|
+- The ``path_return_max_radius`` property can be used to clip the returned path inside a circle (2D) or sphere (3D) radius around the start position.
|
|
|
+
|
|
|
+Query parameters allow limiting the path search to only search up to a specific distance or a specific number of searched polygons.
|
|
|
+These options are for performance and affect the path search directly.
|
|
|
+
|
|
|
+- The ``path_search_max_distance`` property can be used to stop the path search when going over this distance from the start position.
|
|
|
+- The ``path_search_max_polygons`` property can be used to stop the path search when going over this searched polygon number.
|
|
|
+
|
|
|
+When the path search is stopped by reaching a limit the path resets and creates a path from the start position polygon
|
|
|
+to the polygon found so far that is closest to the target position.
|
|
|
+
|
|
|
+.. warning::
|
|
|
+
|
|
|
+ While good for performance, if path search limit values are set too low they can affect the path quality very negatively.
|
|
|
+ Depending on polygon layout and search pattern the returned paths might go into completely wrong directions instead of the direction of the target.
|

 Matthew
Matthew
{kind=link}
{kind=link}
{kind=link}
