
 Jan Hanca
1d24fbe78a
Sync stabilization changes back to development (#998)
Jan Hanca
1d24fbe78a
Sync stabilization changes back to development (#998)
|
4 months ago | |
|---|---|---|
| .. | ||
| Assets | 7 months ago | |
| Registry | 10 months ago | |
| docs | 10 months ago | |
| CMakeLists.txt | 10 months ago | |
| README.md | 10 months ago | |
| gem.json | 4 months ago | |
| preview.png | 10 months ago | |
{kind=link}
README.md
![]()
Sample ROS2 Robots
This is an Asset Gem containing sample robots for the O3DE:
- Proteus Robot
- Husarion ROSbot XL
Note: This Gem superseded deprecated
ProteusRobotandRosRobotSampleGems; versions2.1.0of both Gems were used as a base.
Requirements
- Any O3DE project with the ROS 2 Gem enabled.
Please refer to O3DE documentation to learn more about Gems and about registering Gems in the system and O3DE projects.
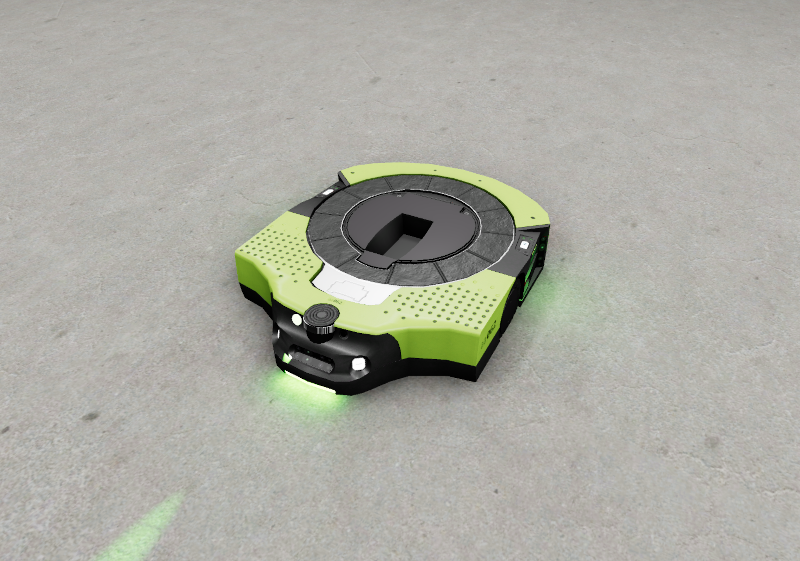
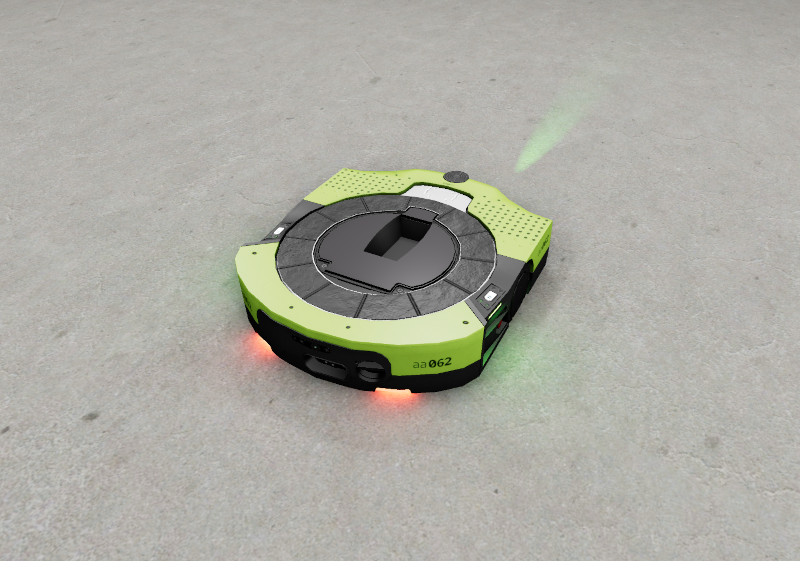
Proteus Robot
Description
The folder ProteusRobot contains a simplified model of Proteus Robot - an autonomous mobile robot that can pick up, transport, and drop off containers. It is delivered as a ready-to-use O3DE prefab, Proteus.prefab, containing visual models, physics and the following ROS 2 components:
ROS2 FrameROS2 Robot ControlROS2 Skid Steering Twist ControlROS2 Lidar Sensor
Additionally, the model is equipped with links that are suitable for adding Camera and Imu sensors.
The robot publishes Lidar Sensor's output on the/base_link/pc ROS 2 topic and can be driven using the /base_link/cmd_vel ROS 2 topic. An example of its use can be found in ROS 2 Project Template.
Screenshots
Husarion ROSbotXL
Description
The folder RosbotXL contains the Husarion ROSbot XL robot - an autonomous mobile robot platform developed by Husarion. The robot is delivered as a ready-to-use prefab, ROSbotXL.prefab, containing visual models, physics and the following ROS 2 components:
ROS2 FrameROS2 Robot ControlROS2 Skid Steering Twist Control
Additionally, the model is equipped with links that are suitable for adding Camera and Imu sensors. There are two extra O3DE prefabs with 2D and 3D LiDAR sensors attached: ROSBot_slamtec.prefab and ROSbot_velodyne.prefab with Slamtec RPLIDAR S1 and Velodyne Puck VLP-16 sensors respectively. The components are visualized with the corresponding meshes.
The robot publishes Lidar Sensor's output on the/base_link/pc ROS 2 topic and can be driven using the /base_link/cmd_vel ROS 2 topic. An example of its use can be found in ROS 2 Project Template.
Screenshots
 \
From left:
\
From left: ROSbotXL_Velodyne.prefab, ROSBotXL_Slamtec.prefab, and ROSbotXL.prefab
 \
From left:
\
From left: ROSbotXL.prefab, ROSBotXL_Slamtec.prefab, and ROSbotXL_Velodyne.prefab
Acknowledgments
This work is licensed under Apache License, Version 2.0. You may elect at your option to use the MIT License instead. Contributions must be made under both licenses.
Models of Husarion ROSbot XL were created based on STL and URDF files kindly shared by Husarion.