|
|
@@ -89,10 +89,18 @@ This category shows the various constraints that are supported. Constraints conn
|
|
|
|:-|
|
|
|
|*Showing the path constraint in action.*|
|
|
|
|
|
|
-|[](https://www.youtube.com/watch?v=8aQ9x8SQSuM)|
|
|
|
+|[](https://www.youtube.com/watch?v=8aQ9x8SQSuM)|
|
|
|
|:-|
|
|
|
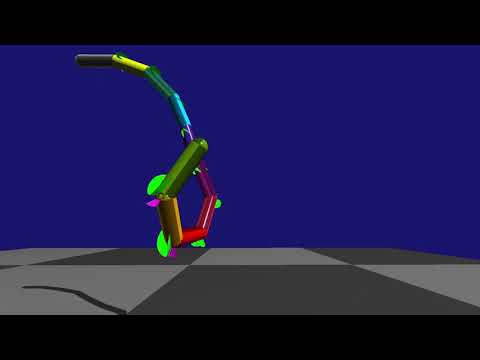
|*Demonstrates a chain of swing-twist constraints (usable for humanoid shoulders). The green cones show the swing limit and the pink pie shows the twist limit.*|
|
|
|
|
|
|
+|[](https://www.youtube.com/watch?v=3w5SgElroBw)|
|
|
|
+|:-|
|
|
|
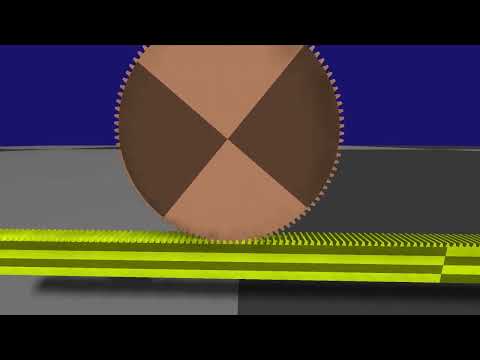
+|*Demonstrates a gear constraint. Note that the gears can be placed at any relative angle of each other, so you could e.g. create a bevel or worm gear.*|
|
|
|
+
|
|
|
+|[](https://www.youtube.com/watch?v=e588KG-ZSxc)|
|
|
|
+|:-|
|
|
|
+|*Demonstrates a rack and pinion constraint.*|
|
|
|
+
|
|
|
### General
|
|
|
|
|
|
This category contains general simulation tests. It demonstrates things like friction, restitution, damping, modifying gravity and continous collision detection. Some highlights:
|

 Jorrit Rouwe
Jorrit Rouwe