
Samples.md 6.9 KB
Jolt Physics Samples
This document describes the demos in the Samples application (currently compiles only under Windows). When you run the samples application the application will initially start paused, press P to unpause it. The menu is accessible through pressing ESC, it has the following options:
- Select Test - This allows you to select between the different types of physics tests
- Test Settings - Some tests will allow extra configuration, if not this setting will be greyed out
- Restart Test (R) - When selecting this, the test will go back to its initial state
- Run All Tests - This will run every tests for 10 seconds before proceeding to the next. This is a good way of visually inspecting the simulation before commiting a code change.
- Next Test (N) - When running all tests, this option can be used to quickly skip to the next test.
- Physics Settings - This menu contains all physics configuration.
- Drawing Options - This menu shows all the options for drawing the internal state of the physics simulation.
- Mouse Probe - This allows you to switch between various collision detection modes to test the different collision detection algorithms
- Shoot Object - A sample application is not complete without being able to shoot some balls at the simulation (B key). This menu allows additional settings.
- Help - A quick help text.
General Controls
- Use the Mouse and WSAD keys to move around, hold Shift to speed up and Ctrl to slow down
- Hold the Space key to pick up an object in the center of the screen and move it around with the mouse and WSAD.
- P - Pause / unpause simulation.
- O - Single step the simulation.
- , - Step back (only when Physics Settings / Record State for Playback is on).
- . - Step forward (only when Physics Settings / Record State for Playback is on).
- Shift + , - Play reverse (only when Physics Settings / Record State for Playback is on).
- Shift + . - Replay forward (only when Physics Settings / Record State for Playback is on).
- T - Dump frame timing information to profile_*.html (when JPH_PROFILE_ENABLED defined).
The Tests
Note that you can watch all movies below in a single YouTube playlist.
Vehicles
This categories shows vehicles created through the VehicleConstraint. These vehicles use ray- or shape casts to detect collision with the ground and simulate a vehicle with an engine, gearbox, differentials and suspension.
| |
|:-|
|A wheeled vehicle.|
|
|:-|
|A wheeled vehicle.|
| |
|:-|
|Demonstrates a tracked vehicle with a turret constrained to the main body with hinge constraints.|
|
|:-|
|Demonstrates a tracked vehicle with a turret constrained to the main body with hinge constraints.|
Rig (Ragdolls)
This category demonstrates how ragdolls can be made and controlled using keyframing or motors.
| |
|:-|
|A ragdoll set to kinematic mode (infinite mass, simulated using velocities only) interacting with dynamic objects.|
|
|:-|
|A ragdoll set to kinematic mode (infinite mass, simulated using velocities only) interacting with dynamic objects.|
| |
|:-|
|Demonstrating a humanoid ragdoll driven by motors which are trying to match a sprint animation in local space (green sticks).|
|
|:-|
|Demonstrating a humanoid ragdoll driven by motors which are trying to match a sprint animation in local space (green sticks).|
| |
|:-|
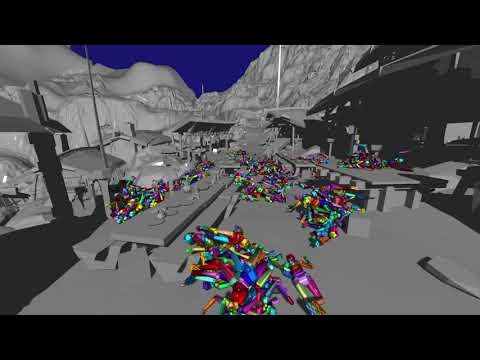
|160 Ragdolls being dropped on a scene from Horizon Zero Dawn.|
|
|:-|
|160 Ragdolls being dropped on a scene from Horizon Zero Dawn.|
| |
|:-|
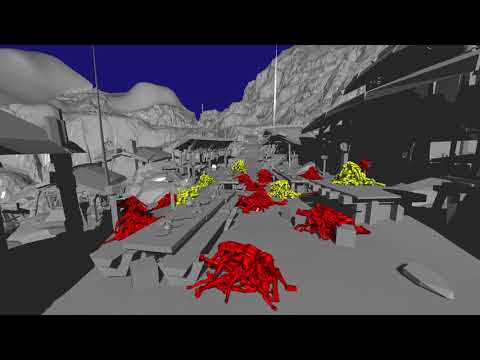
|160 Ragdolls dropping on a pile, simulated using the Jolt Physics engine. Yellow means the ragdoll is simulated, red means the simulation is sleeping.|
|
|:-|
|160 Ragdolls dropping on a pile, simulated using the Jolt Physics engine. Yellow means the ragdoll is simulated, red means the simulation is sleeping.|
| |
|:-|
|A pile of ragdolls that are driven to a specific animated death pose. This gives the ragdolls 'stiffness'.|
|
|:-|
|A pile of ragdolls that are driven to a specific animated death pose. This gives the ragdolls 'stiffness'.|
Character
This category shows how you can simulate a (humanoid) character using a capsule.
| |
|:-|
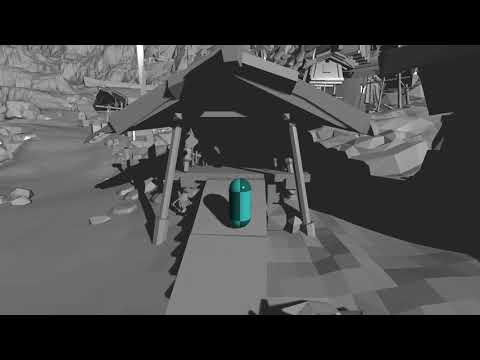
|A demonstration of a game Character. Demonstrates moving, sliding against the environment, crouching and jumping.|
|
|:-|
|A demonstration of a game Character. Demonstrates moving, sliding against the environment, crouching and jumping.|
Water
This category shows how you can implement a water simulation in your game.
| |
|:-|
|Water buoyancy and friction simulation. Demonstrates how various shapes and compound shapes behave in the water. The right most object has a lowered center of mass.|
|
|:-|
|Water buoyancy and friction simulation. Demonstrates how various shapes and compound shapes behave in the water. The right most object has a lowered center of mass.|
Constraints
This category shows the various constraints that are supported. Constraints connect two or more bodies together and limit the relative movement.
| |
|:-|
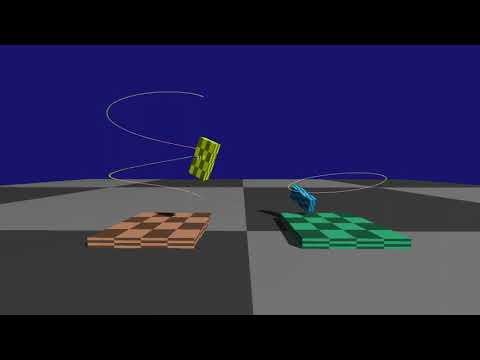
|Showing the path constraint in action.|
|
|:-|
|Showing the path constraint in action.|
| |
|:-|
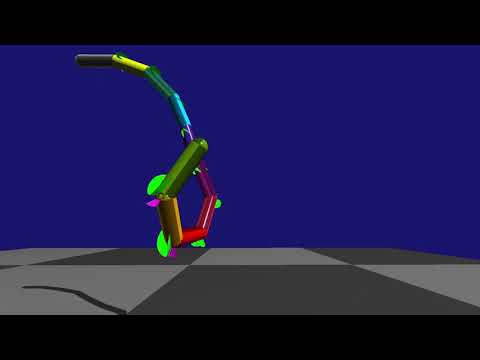
|Demonstrates a chain of swing-twist constraints (usable for humanoid shoulders). The green cones show the swing limit and the pink pie shows the twist limit.|
|
|:-|
|Demonstrates a chain of swing-twist constraints (usable for humanoid shoulders). The green cones show the swing limit and the pink pie shows the twist limit.|
General
This category contains general simulation tests. It demonstrates things like friction, restitution, damping, modifying gravity and continous collision detection. Some highlights:
| |
|:-|
|A YouTube video showing stability of a pile of boxes.|
|
|:-|
|A YouTube video showing stability of a pile of boxes.|
| |
|:-|
|Demonstrates objects sliding along a polygon mesh. Internal mesh edges are ignored and do not cause objects to bounce off.|
|
|:-|
|Demonstrates objects sliding along a polygon mesh. Internal mesh edges are ignored and do not cause objects to bounce off.|
| |
|:-|
|1000 random shapes in a funnel.|
|
|:-|
|1000 random shapes in a funnel.|
| |
|:-|
|We will automatically split up the simulation in islands of non-interacting bodies and distribute the work across multiple threads. Each island has its own color.|
|
|:-|
|We will automatically split up the simulation in islands of non-interacting bodies and distribute the work across multiple threads. Each island has its own color.|
Shapes & Scaled Shapes
These categories show off all of the supported shapes and how they can be scaled at run-time.
| |
|:-|
|A height field shape using various scales in Jolt Physics: Uniform, Non uniform, Mirrored, Inside out|
|
|:-|
|A height field shape using various scales in Jolt Physics: Uniform, Non uniform, Mirrored, Inside out|