|
@@ -21,7 +21,8 @@ return {
|
|
|
description = [[
|
|
description = [[
|
|
|
A list of joint transforms for the device. Each transform is a table with 3 numbers for the
|
|
A list of joint transforms for the device. Each transform is a table with 3 numbers for the
|
|
|
position of the joint, 1 number for the joint radius (in meters), and 4 numbers for the
|
|
position of the joint, 1 number for the joint radius (in meters), and 4 numbers for the
|
|
|
- angle/axis orientation of the joint.
|
|
|
|
|
|
|
+ angle/axis orientation of the joint. There is also a `radius` key with the radius of the
|
|
|
|
|
+ joint as well.
|
|
|
]]
|
|
]]
|
|
|
}
|
|
}
|
|
|
},
|
|
},
|
|
@@ -43,6 +44,10 @@ return {
|
|
|
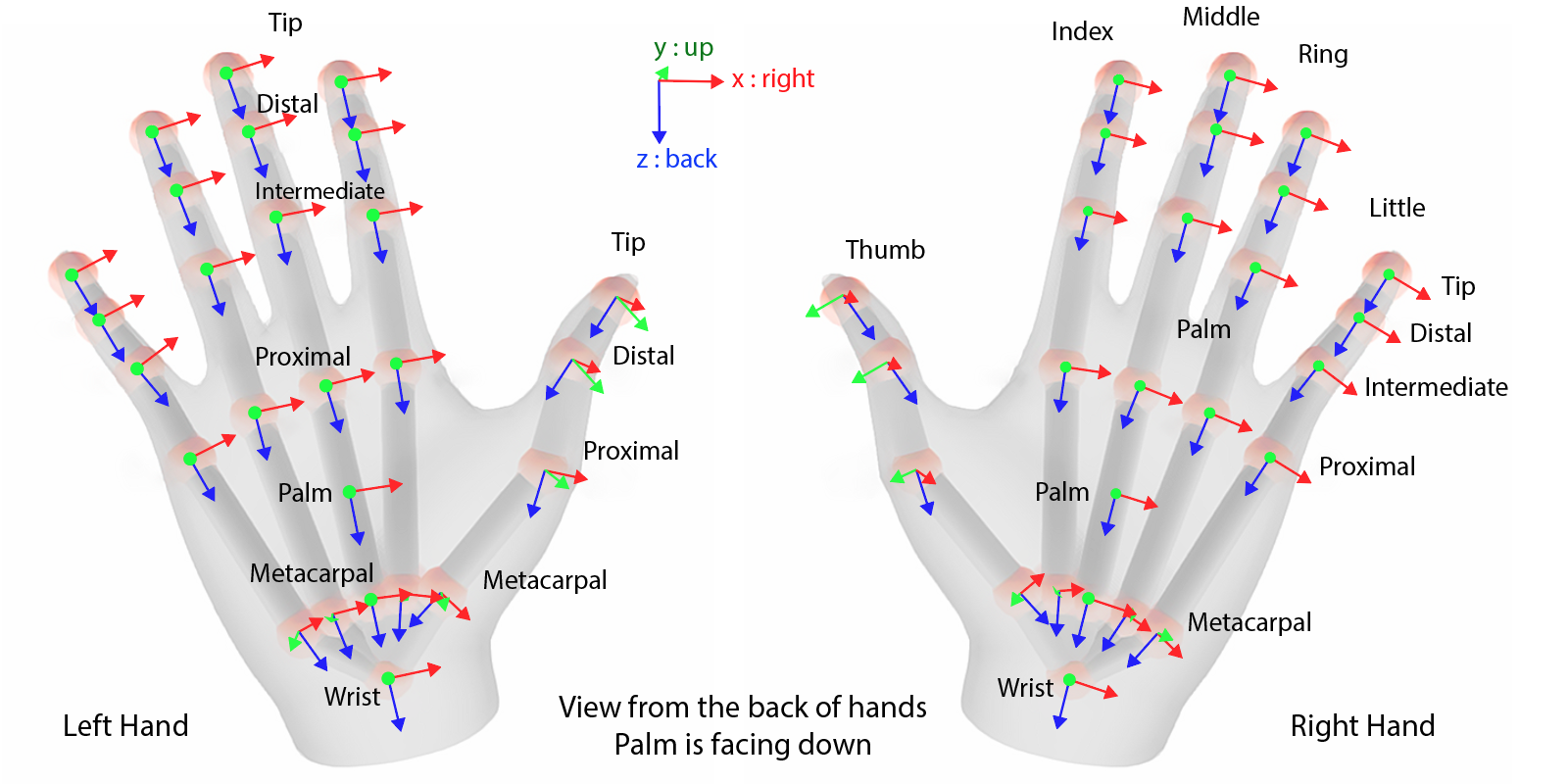
direction, pointing towards the fingertips. The +Y direction is "up", pointing out of the back
|
|
direction, pointing towards the fingertips. The +Y direction is "up", pointing out of the back
|
|
|
of the hand. The +X direction is to the right, perpendicular to X and Z.
|
|
of the hand. The +X direction is to the right, perpendicular to X and Z.
|
|
|
|
|
|
|
|
|
|
+ Here's a picture, courtesy of Khronos Group:
|
|
|
|
|
+
|
|
|
|
|
+ 
|
|
|
|
|
+
|
|
|
Hand joints are returned in the following order:
|
|
Hand joints are returned in the following order:
|
|
|
|
|
|
|
|
<table>
|
|
<table>
|

 bjorn
bjorn