| 123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960616263646566676869707172737475767778798081828384858687888990919293949596979899100101102103104105106107108109110111112113114115116117118119120121122123124125126127128129130131132133134135136137138139140141142143144145146147148149150151152153154155156157158159160161162163164165166167168169170171172173174175176177178179180181182183184185186 |
- return {
- tag = 'input',
- summary = 'Get skeletal joint transforms tracked by a device.',
- description = [[
- Returns a list of joint transforms tracked by a device. Currently, only hand devices are able
- to track joints.
- ]],
- arguments = {
- device = {
- type = 'Device',
- description = 'The Device to query.'
- },
- t = {
- type = 'table',
- description = 'A table to fill with the joint transforms, instead of allocating a new one.'
- }
- },
- returns = {
- transforms = {
- type = 'table',
- description = [[
- A list of joint transforms for the device. Each transform is a table with 3 numbers for the
- position of the joint, 1 number for the joint radius (in meters), and 4 numbers for the
- angle/axis orientation of the joint. There is also a `radius` key with the radius of the
- joint as well.
- ]]
- }
- },
- variants = {
- {
- arguments = { 'device' },
- returns = { 'transforms' }
- },
- {
- arguments = { 'device', 't' },
- returns = { 'transforms' }
- }
- },
- notes = [[
- If the Device does not support tracking joints or the transforms are unavailable, `nil` is
- returned.
- The joint orientation is similar to the graphics coordinate system: -Z is the forwards
- direction, pointing towards the fingertips. The +Y direction is "up", pointing out of the back
- of the hand. The +X direction is to the right, perpendicular to X and Z.
- Here's a picture, courtesy of Khronos Group:
- 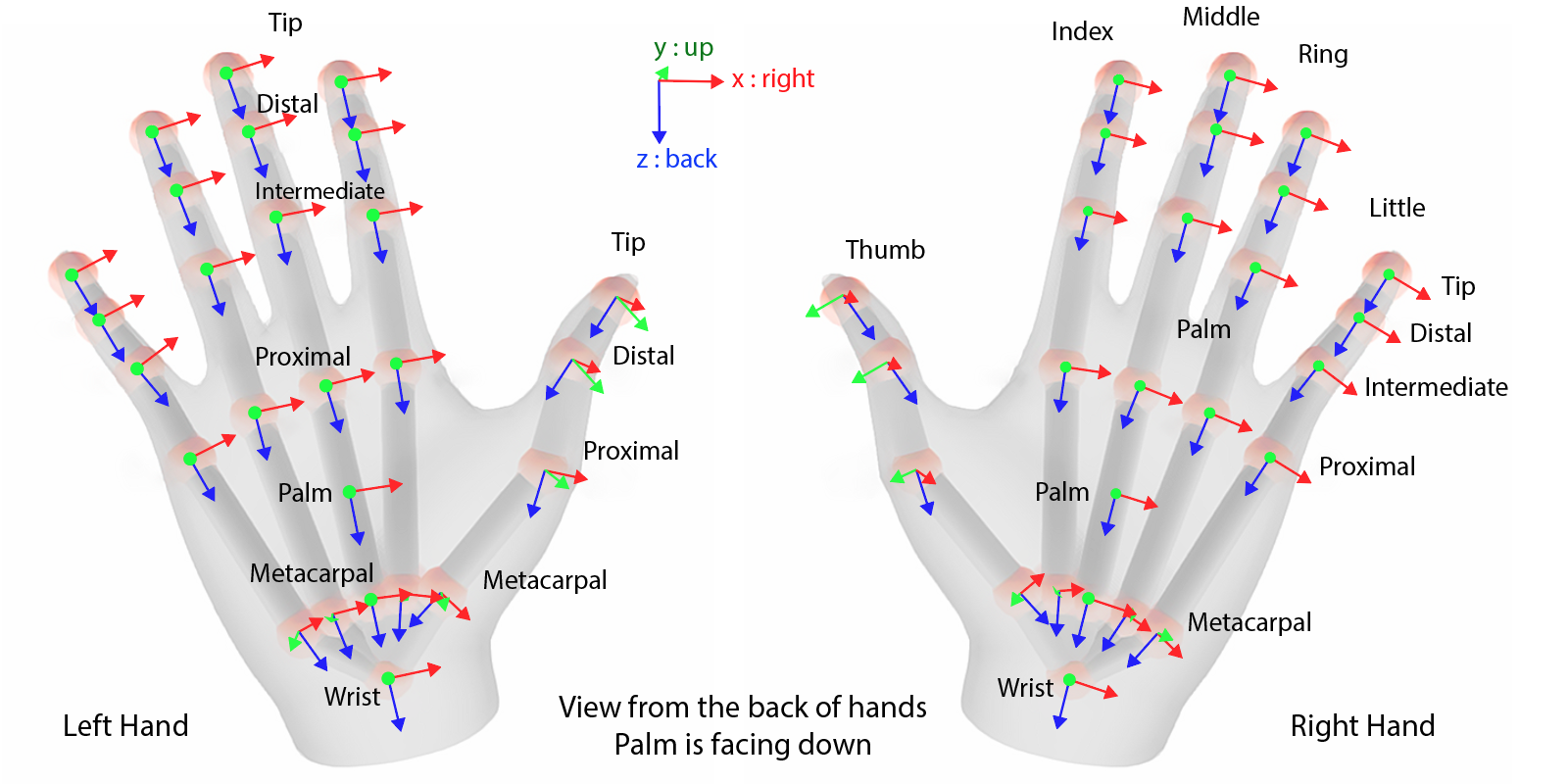
- Hand joints are returned in the following order:
- <table>
- <thead>
- <tr>
- <td colspan="2">Joint</td>
- <td>Index</td>
- </tr>
- </thead>
- <tbody>
- <tr>
- <td colspan="2">Palm</td>
- <td>1</td>
- </tr>
- <tr>
- <td colspan="2">Wrist</td>
- <td>2</td>
- </tr>
- <tr>
- <td rowspan="4">Thumb</td>
- <td>Metacarpal</td>
- <td>3</td>
- </tr>
- <tr>
- <td>Proximal</td>
- <td>4</td>
- </tr>
- <tr>
- <td>Distal</td>
- <td>5</td>
- </tr>
- <tr>
- <td>Tip</td>
- <td>6</td>
- </tr>
- <tr>
- <td rowspan="5">Index</td>
- <td>Metacarpal</td>
- <td>7</td>
- </tr>
- <tr>
- <td>Proximal</td>
- <td>8</td>
- </tr>
- <tr>
- <td>Intermediate</td>
- <td>9</td>
- </tr>
- <tr>
- <td>Distal</td>
- <td>10</td>
- </tr>
- <tr>
- <td>Tip</td>
- <td>11</td>
- </tr>
- <tr>
- <td rowspan="5">Middle</td>
- <td>Metacarpal</td>
- <td>12</td>
- </tr>
- <tr>
- <td>Proximal</td>
- <td>13</td>
- </tr>
- <tr>
- <td>Intermediate</td>
- <td>14</td>
- </tr>
- <tr>
- <td>Distal</td>
- <td>15</td>
- </tr>
- <tr>
- <td>Tip</td>
- <td>16</td>
- </tr>
- <tr>
- <td rowspan="5">Ring</td>
- <td>Metacarpal</td>
- <td>17</td>
- </tr>
- <tr>
- <td>Proximal</td>
- <td>18</td>
- </tr>
- <tr>
- <td>Intermediate</td>
- <td>19</td>
- </tr>
- <tr>
- <td>Distal</td>
- <td>20</td>
- </tr>
- <tr>
- <td>Tip</td>
- <td>21</td>
- </tr>
- <tr>
- <td rowspan="5">Pinky</td>
- <td>Metacarpal</td>
- <td>22</td>
- </tr>
- <tr>
- <td>Proximal</td>
- <td>23</td>
- </tr>
- <tr>
- <td>Intermediate</td>
- <td>24</td>
- </tr>
- <tr>
- <td>Distal</td>
- <td>25</td>
- </tr>
- <tr>
- <td>Tip</td>
- <td>26</td>
- </tr>
- </tbody>
- </table>
- ]],
- example = [[
- function lovr.draw(pass)
- for _, hand in ipairs({ 'left', 'right' }) do
- for _, joint in ipairs(lovr.headset.getSkeleton(hand) or {}) do
- pass:points(unpack(joint, 1, 3))
- end
- end
- end
- ]],
- related = {
- 'lovr.headset.getPose',
- 'lovr.headset.animate'
- }
- }
|
